作者|周永亮
编辑|靖宇
谈到移动机器人,你可能经常遇到,比如在酒店、医院、餐饮等服务领域,经常会看到机器人的身影。除此之外,波士顿动力公司 (Boston Dynamics) 的网红机器人,各种摸爬滚打的视频在网络上也吸引了众多关注。
但在一些更复杂、极端的环境下,机器人依旧叫好不叫座,亟待技术层面的深层突破。
这样的局面,曾经的无人驾驶也遇到同样的问题。从 2004 到 2007 年,美国国防部高级研究计划局(DARPA,Defense Advanced Research Projects Agency)赞助了无人驾驶挑战赛。大赛除了捧红了激光雷达公司 Velodyne,同时也直接催生了此后十几年火热的自动驾驶赛道。
遵循同样的思路,2018 年 DARPA 组织了机器人地下挑战赛(Subterranean Challenge,SubT),并设置了 500 万美元的奖金,吸引世界各地的机构和公司的工程师和科学家团队来参加比赛。

DARPA SubT 地下挑战赛决赛结果|IEEE
如今,此次持续近三年的系列赛已经落幕,最终 CERBERUS 团队和 CSIRO Data61 团队,分别获得决赛的第一名和第二名。
除了比赛结果,这次挑战赛更大的价值,在于对现实的映射。回顾这场比赛中遇到的问题和给出的解决方案,可以更深层地了解机器人发展的动向,以及加速机器人的普及。
机器人的「死亡挑战赛」
谈起举办这次地下挑战赛的直接契机,DARPA 战术技术办公室项目经理 Timothy Chung 表示,这主要考虑到作战人员的需求,以及先遣应急队的需求。他们需要各种地下环境中执行搜索和救援的任务,可能人口密集的事故、自然灾害,也可能是矿山等救援。
同时,在这次挑战赛的官网,引用的克劳塞维茨在《战争论》中的一句话,「战争与地形的关系,要求我们具备快速而精准地获取任何地区地形信息的能力。」

Cerberus 团队的 ANYmal 机器人在自主探索洞穴|IEEE
在比赛场地的选择上,这次地下挑战赛选取了地下隧道、城市地下、岩洞三个最具挑战性的场景。在这样的环境中,机器人将面临很多极限的情况,比如地形非常复杂,无法使用 GPS,通信受到限制,能见度低,移动性也受到挑战等等。简单说,DARPA 的目标是要寻找能在极端环境下,仍然能够通行的机器人。
据主办方介绍,他们希望参赛团队在四个领域推动机器人技术的边界:移动性(如何迅速移动)、感知(如何理解外界)、网络(把数据传回服务器)和自主权(机器自主决策)。
这场挑战赛的规则是,参赛团队要搜索、检测比赛场地,找到并定位主办方设置的 10 到 30 件物品的精确位置,这些物品可能包括人体模型、门、电动泵、阀门、背包、灭火器、收音机或手机,以及更多抽象的东西,如煤气泄漏。团队的最终得分主要取决于他们能够找到多少物品,以及用时多长。
与此同时,参赛人员被禁止进入矿洞隧道,所有的工作必须要有参赛的机器人完成。标记精度在 5 米以内,被认为完成了定位,能获得积分。
要想取得比赛的成功,还是非常有难度的。因为涉及到隧道、城市、洞穴等场景,因此需要一个整体解决方案,来实现能力的相对平衡。举个简单例子,机器人需要足够小巧才能通过狭窄通道,但它又需要携带足够大的传感器和计算机,来为自己测绘、导航和作出自主决策;另外,在动力系统方面,机器人需要更加节能,才能在极端环境中行驶数公里,但自主决策和测绘都需要很大的电力需求。
对于这场比赛,官方的称呼是「地下挑战赛」,类似铁人三项比赛,不是要找到最强的游泳、跑步和自行车运动员,而是要三项综合成绩最好的人。很多人觉得这种说法过于委婉,更应该把它称为「机器人死亡挑战赛」或「机器人奥运会」。
「机器人与地下城」
要真正理解这次挑战赛,需要简单回顾一下整个过程。据了解,2019 年 8 月,来自 8 个国家的 11 支机器人团队,汇集在美国匹兹堡的一个矿洞,这是第一次隧道比赛(Tunnel Circuit)的场地。与团队一起出现的,还有 20 架无人机、64 架地面机器人和一架名为 Duckiefloat 的自主飞艇。

参加 SubT 地下挑战赛参赛团队|IEEE
大部分团队的策略,是先派出机器人侦察、探测环境,然后根据场景和机器人性能,选择合适的机器人完成定位任务。在比赛最开始时,情况还都很顺利。但意外很快发生,通信成了这次比赛的最大问题。就在机器人转过矿洞第一个拐角的时候,许多团队失去了与机器人的联系,因为无线电波无法穿透坚硬的岩石。
随后,时间很快来到了 6 个月后,第二场比赛(Urban Circuit)来到了西雅图附近的萨索普核电站。这个核电站始建于 1977 年,建设完成 80% 的时候,政府决定不再投入资金,这个核电站也成了废弃项目。如今,它成为此次挑战赛的场地。
如果说,在隧道挑战赛中,通信是一个巨大的挑战。那在这次城市地下赛道中,通讯已经不是什么大问题。参赛团队进行了升级和迭代,使用可部署的网络节点建立了网状网络。机器人在前进的过程中,每隔一段距离就会放置一个小的通讯机器人,然后它会自行建立起网络节点,这样就可以在通讯范围之外进行长时间的工作。
通信问题解决了,但低温成了问题。当时,废弃核电站内的温度是-4 摄氏度,甚至比室外(2 摄氏度)还要低。所以,参赛的团队人员和机器人,都无法长期在比赛场地逗留太久,比赛结束手立即转移到温暖的地方。
最终,CoSTAR 依靠更好的性能和表现,在城市地下巡回赛中,总共获得 16 分排名第一,比排名第二的 Explorer 高出 5 分,CTU-CRAS-NORLAB 团队获得第三名。

DARPA SubT 地下挑战赛决赛海报|IEEE
第三场是洞穴巡回赛,原本要在 2020 年秋季举办,但因为 COVID-19 被迫取消。所以,这场赛事直接跳到了 2021 年 9 月的决赛,地点是在路易斯维尔巨型洞穴,这是一个非常有挑战性的场地。整个洞穴大约有 400 万平方英尺(约 37 万平方米),它的特点是结合了 DARPA 设计的三个场景,有不规则通道和大型洞穴系统,还具有复杂布局的地下结构。
这时,参赛队伍已经从最初的 11 支,减少到 8 支。对所有的参赛队伍来说,自主性是决赛的最大挑战。因为比赛场地不允许团队人员进入,每支团队只有一个人可以对机器人进行远程操控,所以让机器人自行决定去哪里,如何去哪里,将是赢得比赛的关键。
在决赛结束时,CERBERUS 和 CSIRO Data61 两支队伍都发现了 23 件物品。因为用时更少,CERBERUS 团队赢得最终的决赛冠军,拿走了 200 万美元奖金,CSIRO Data61 则获得第二名。
启示和未来
回顾机器人地下挑战赛的三年间,应该是梦想照进现实的三年。CSIRO Data61 团队负责人 Navinda Kottege 在接受采访时曾表示,这次挑战赛最有价值的地方在于,DARPA 刚开始知道机器人并没有这种能力,但要求三年之后,形成一支有竞争力的机器人团队。
最初的想法,也确实变为了现实。在挑战赛开始之前,他们团队确实有一些很炫酷的技术,但没有机器人系统可以可靠地工作一个小时或者更长;但三年之后,他们可以部署机器人,让他们自主地去做一些任务,然后团队成员去做自己手中的工作,这是非常大的进步。
与此同时,这次挑战赛也带来了很多技术层面的惊喜,可能会引领机器人的发展。在这次系列赛中,参赛团队带来了很多形态的机器人,包括六足仿蜘蛛机器人,四轮车型机器人、履带坦克型机器人、飞行机器人等。其中,轮式机器人提供了最可靠的机动性,无人机可以探索一些较大的洞穴。
但最令人印象深刻的是 CERBERUS 团队的四足机器人 ANYmal C,同时在比赛中表现可靠,即便遭遇碰撞也可以保持稳定,完成了团队的大部分工作。

ANYmal C 四足机器人|IEEE
这款机器人是由瑞士 ANYbotics 公司打造,有点像一只大型犬,重量在 100 斤左右,配备了摄像头、3D 传感器,包括用于 3D 绘图和同步定位和映射(SLAM)的激光雷达,可以执行搜救、检查等任务。移动速度上,它可以达到 1 米/秒,还能轻松处理 20 度的斜坡和 45 度的楼梯,以及跨越 25 厘米的空隙,通过仅有 60 厘米的通道。
更重要的是,ANYmal C 不需要进行艰苦的建模过程,以及危险且高成本的实地测试,就可以应对现实世界复杂的地形地貌。那它是怎么达到的呢?
据团队负责人介绍,在复杂的地形和无法准确探测环境的情况下,机器人必须依赖本体感受(proprioceptive)——在高时间分辨率下感测其自身的身体形态。
为此,瑞士 ANYbotics 公司提出了一种稳健的控制器。这种控制器仅使用联合编码器和惯性测量单元的本体感受度量,这是腿式机器人上最耐用最可靠的传感器。有了新型控制器的加持,这些机器人可以轻松翻越溪流、草地、雪地、碎石坡等富有挑战的场景。
同时,这个控制器由一种神经网络策略驱动,在模拟环境中进行训练。虽然没有任何现实世界的数据和精确的地形模型,但控制器仍然能克服野外的各种不规则地形。研究人员还强调说,「我们的系统可以穿越几乎所有地形,而且一次都没有摔倒。」
除此之外,研发人员还引入了一些新的方法:首先,在模型上,ANYbotics 公司并没有使用当前主流的的多层感知器(MLP),而是使用了序列模型,特别是感受状态的时间卷积网络(TCN);其次,是关于特权学习(privileged learning)。新模型在训练中分为两个阶段,首先训练教师策略,该策略可以访问特权信息,即对地面的真实了解和机器人与之的接触;随后教师指导纯本体感受的学生控制器学习,后者仅使用机器人本身可用的传感器信息。
此外,这项研究中提到的方法并没有用到摄像头、激光雷达或接触式传感器信息,只依赖本体感受传感器信号(proprioceptive sensor signal)来提高控制策略在不同地形中的适应性和稳健性。
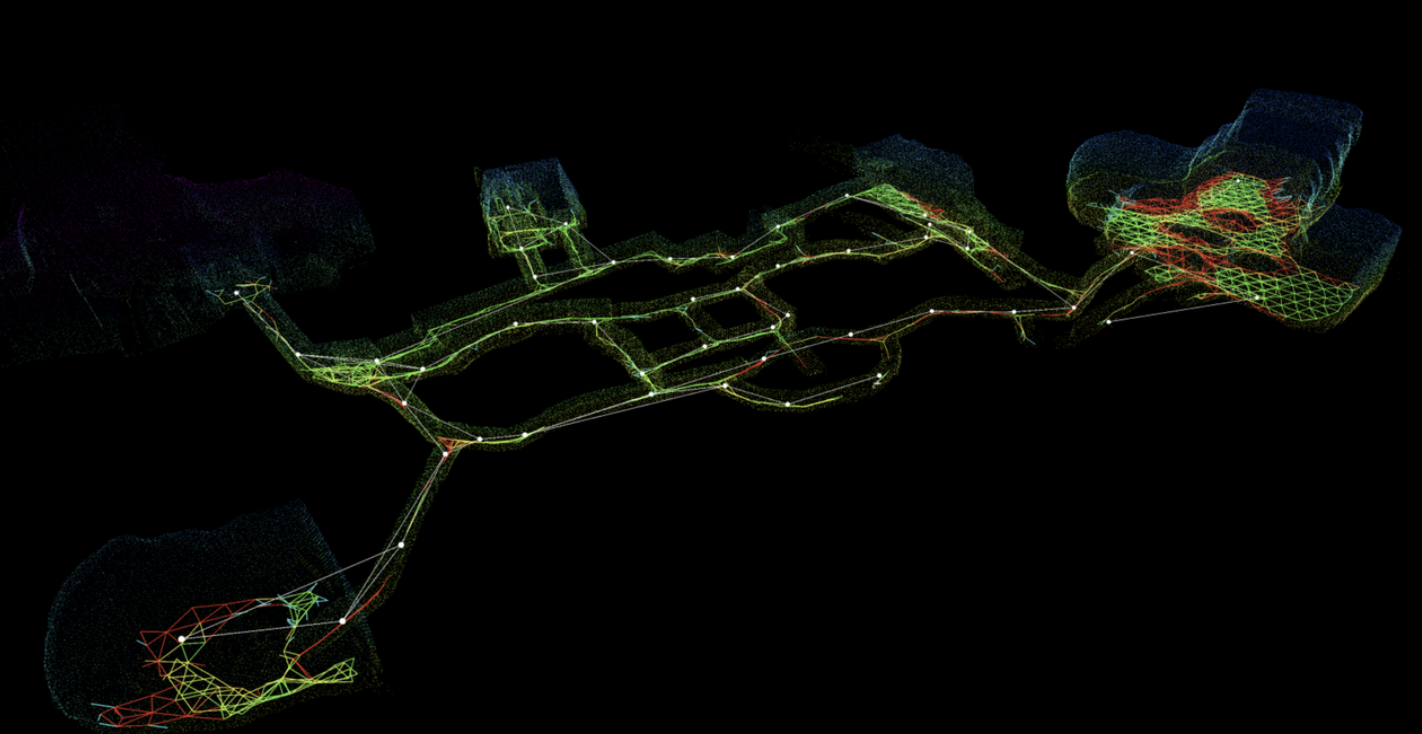
CSIRO 团队测绘的地图精度极高|IEEE
除了四足机器人,高精度的测绘地图,也是这个挑战赛让人惊喜的地方。在此次挑战赛中,CSIRO data61 团队虽然排在第二位,但他们的机器人测绘得到的地图,与 DARPA 的真实地图相差不到 1%。
据了解,DARPA 官方的地图,是邀请了专业的技术人员,使用了非常昂贵的设备,花费了 100 个小时进行专业测绘得来。但 CSIRO data61 团队,只用了不到一个小时内,得到的结果就跟官方地图接近。这背后的技术,着实让所有人都很吃惊和好奇。
据了解,在 CSIRO data61 团队背后,有一套叫 Wildcat 的自主机器人的研发平台和工业应用的商业化解决方案。据团队负责人曾介绍说,Wildcat 使用非线性优化算法,将来自机器人传感器的 3D LiDAR(光检测和测距)数据,实时转换为高度详细和准确的环境地图,同时为机器人控制提供更新速率的姿态信息。
机器人可以实时共享地图片段,以帮助他们保持对环境变化的认识,并探索新的领域。这使他们能够轻松地将不同的机器人平台集成到他们的车队中。
Wildcat 利用 CSIRO 十多年的 SLAM 研发经验,该技术与 IMU(惯性运动单元)和 LiDAR 传感器结合使用,可选择添加其他传感器,如化学、放射、气体、GPS 和 Wi-Fi。
目前,Wildcat 解决方案已经开始商业化,无人机公司 Emesent 是其第一个客户,同时它还其他几家公司合作。
几年前,波士顿动力在 YouTube 上传的机器人视频,捧红了旗下的双足机器人和四足机器狗。但是,即便成为了「网红」,波士顿动力辗转于谷歌、软银和现代汽车的命运,也折射出机器人产业的举步维艰。
最近两年,宇树科技等国内创业团队将四足机器人价格做到了万元区间,而小米等巨头公司也开始纷纷押注机器人赛道,可以看出机器人已经成为一个新的风口。但不可否认的是,虽然机器人的价格已经不再「高不可及」,但是其使用场景依然局限于安保等固定场景。
DARPA 机器人挑战赛虽然考验的是机器人在极端环境中的搜寻和施救能力,但正像 15 年前的无人驾驶大赛催生了自动驾驶赛道,机器人大赛中所锻炼出的地形扫描、制图和运动能力,或将很快应用到市面可见的机器人产品中,极大拓展机器人的应用场景,并最终加快机器人向消费电子产品类别的过渡步伐。
,这群极客 深爱半导体 在地下加入了一场“机械人衰亡挑战赛”相关:
动静称公共签定5年期10亿欧元合同:使用高通自动驾驶芯片鞭牛士 5月2日消息,据报道,知情人士今日称,大众汽车与高通公司签署了一份为期五年的合同。从2026年起,大众汽车在其全球所有品牌中使用高通的“系统芯片”(SoC)自动驾驶芯片技术。所谓的SoC,是把CPU、GPU、调制解调器等芯片集成在一起的系统级芯片,可提升性能,降低功耗,节约空间。在此之前,宝马汽车和梅赛德斯-奔驰等,已经与芯片厂商达成了类似的长期合作。其中,宝马汽车与高通合作,而梅赛德斯-奔驰与英伟达(Nvid..
5月1日15时至2日15时,北京新增本土传染者50例,详情发布5月2日,在北京市新型冠状病毒肺炎疫情防控工作第322场新闻发布会上,市疾控中心副主任、全国新型冠状病毒肺炎专家组成员庞星火介绍,5月1日15时至2日15时,本市新增本土新冠肺炎病毒感染者50例,其中确诊病例41例、无症状感染者9例;房山区17例、朝阳区13例、海淀区7例、丰台区6例、通州区4例、石景山区3例。管控人员45例、社区筛查5例。房山区17例感染者情况如下:感染者514:为感染者370的妻子。居家隔离期间发现,5月2日诊断..
上海福利院白叟未衰亡被转运 5人被问责5月1日下午,网传上海新长征福利院在转运“死亡”老人时,发现老人仍有生命体征。上海市普陀区高度重视,第一时间开展调查,并将老人转运至医院救治,目前老人生命体征平稳。根据调查结果,对涉事单位和相关责任人处理如下:1、对上海市普陀区民政局党组书记、局长张建东党纪立案,接受进一步调查;对普陀区民政局党组成员副局长黄耀红、养老服务科科长刘颖华、长征镇社会事业发展办公室主任吴友成3人免职、党纪立案,接受进一步..
北京3地调整为高风险地域 中新网北京5月2日电(徐婧)北京市疾控中心副主任庞星火在5月2日的疫情防控工作新闻发布会上通报,截至2022年5月1日24时,北京市朝阳区建外街道北郎东社区、劲松街道农光东里社区近14天各累计报告6例本土确诊病例;房山区窦店镇一街村近14天累计报告9例本土确诊病例。经市疾控中心评估,按照《北京市新冠肺炎疫情风险分级标准》,北京即日起将朝阳区建外街道北郎东社区、劲松街道农光东里社区,房山区窦店镇一街村由中风险地区..
上海普陀区5人因错转福利院白叟问题被问责 中新网5月2日电 据上海市纪委市监察委员会官方微博消息,上海市普陀区民政局党组书记、局长张建东,党组成员、副局长黄耀红,养老服务科科长刘颖华,长征镇社会事业发展办公室主任吴友成,新长征福利院院长葛芳等,对新长征福利院错转一名老人问题负有责任,造成严重不良影响。张建东被党纪立案,黄耀红、刘颖华、吴友成3人均被免职并党纪立案,葛芳被免职并政务立案。5人均接受进一步调查。 上海市纪委市监察委员会官方..
4月22日以来,北京市累计陈述400例新冠肺炎病毒传染者 中新网北京5月2日电(徐婧)北京市疾控中心副主任庞星火表示,4月22日以来,北京市累计报告400例新冠肺炎病毒感染者,涉及14个区,其中朝阳区156例、房山区103例、通州区43例、丰台区29例、顺义区22例、海淀区16例、石景山区10例、昌平区8例、大兴区6例、西城区2例、延庆区2例、东城区1例、门头沟区1例、经开区1例。 庞星火说,北京市疾控中心对4月22日以来引发续发感染者较多的病例分析发现如下特点:一是在传染期有多..
上海疾控专家解读家庭等糊口区域科学消毒体例 央广网上海5月2日消息(记者郭振丹)上海市疾控中心传染病防治所消毒与感染控制科主任朱仁义在5月2日举行的上海市新冠肺炎疫情防控新闻发布会上表示,家庭等生活区域科学消毒包括三方面,即有无必要消毒,采用正确消毒方法,以及把握消毒的度。 首先是有无必要消毒。朱仁义介绍,目前来说,消毒的目的即是要杀灭新冠病毒。尽管新冠病毒很小,我们看不见,但可以推测它可能的来源。比如,新冠核酸检测阴性的家庭,家庭自身..
5月1日15时至2日15时,北京新增本土新冠肺炎病毒传染者50例 中新网北京5月2日电(徐婧)北京市疾控中心副主任庞星火在5月2日的疫情防控工作新闻发布会上通报,5月1日15时至2日15时,北京市新增本土新冠肺炎病毒感染者50例,其中确诊病例41例、无症状感染者9例;房山区17例、朝阳区13例、海淀区7例、丰台区6例、通州区4例、石景山区3例。管控人员45例、社区筛查5例。 【编辑:孙静波】
河南郑州发现1例新冠肺炎确诊病例 详情发布 中新网5月2日电 据“郑州发布”微信公众号消息,2022年5月2日0时至12时,郑州市发现1例新冠肺炎确诊病例,现将具体情况通报如下: 病例136:职业:引导员,工作地址:郑州东站(心怡路199号),现住址:郑东新区祭城26号院。 4月24日,7:38—21:00在工作地出站口9活动(期间均做好个人防护,以下同),期间12:08在阿利茄汁面(工作地内部,以下同)就餐,21:20返回家未外出。 4月25日,18:19到金庄社区东八社区8号..
黄金72小时已过!长沙自建房倾圮救援为何如斯艰难?4月29日,湖南长沙一居民自建房发生倒塌事故,造成23人被困、39人失联,相关救援和应急处置工作正在推进。截至目前,已救出7名被困人员,第8名受困者正在全力营救中。救援为何如此艰难?4月29日12时24分,长沙市望城区金山桥街道金坪社区盘树湾一居民自建房发生倒塌事故。经初步调查,倒塌房屋系居民自建房,共8层,其中1楼为门面,2楼为饭店,3楼为放映咖啡馆,4、5、6楼为家庭旅馆,7、8楼为自住房。承租户对房屋有不同程度的..